Geneva Mechanism 日内瓦机构 MaxScript

间歇性传递机构 Intermittent Transmission Mechanism
间歇性传递机构 Transmission Drive 将连续转动的「传动」转换为「间歇旋转」运动齿轮机构,广泛应用于各种可转位设备和机械中。常见的间歇性传递机构即日内瓦机构,探讨如何使用 3D 软体来制作动态影片,展示其运动原理和特点。日内瓦机构由一个带有圆形凸起的主动轮和一个带有等分的插槽的从动轮组成、凸轮分度机构。
Cam Indexing Mechanism 当主动轮连续旋转时,其圆形凸起会与从动轮的插槽之相齿合,使从动轮旋转一定角度,然后脱离接触,使从动轮停止旋转。这个过程会不断重复,使从动轮产生间歇旋转的运动。Geneva Drive 日内瓦机构的优点是能够精确地控制从动轮的旋转角度和停止位置,而且结构简单、传动过程平稳、提升成本及效率。
- 传动曲柄半径 Drive Crank Radius
- 传动插槽数量 Driven Slot Quantity
- 传动销直径 Drive Pin Diameter
- 传动销允许间隙 Allowed Clearance
- 中心距离 Center Distance
- 日内瓦车轮半径 Geneva Wheel Radius
研究日内瓦机构于 3ds max 使用 MaxScript 的运动角度计算。目前谨初步旋转计算,间隙细节尚未考量。
三角形计算函数 (MaxScript)
fn gTrigonometric La Lb Lc gAngle =
(
semip = (La + Lb + Lc) / 2
Const = sqrt(semip * (semip - La) * (semip - Lb) * (semip - Lc))
if gAngle == "A" then
asin(2 * Const / (Lb * Lc))
else if gAngle == "B" then
asin(2 * Const / (La * Lc))
else
180 - asin(2 * Const / (Lb * Lc)) - asin(2 * Const / (La * Lc))
)依据 La, Lb, Lc 三个边长计算角度,可以选择 (A 或 B)
传动轮旋转角速度
Loops = Y / 360 -- 超出一圈 360 度的处理
Y_Circle = Y - (360 * (Loops as Integer)) as Float -- 只一圈 360 度R_Rotation = Y_Circle
处于槽口中间时
if( Y_Circle > -55 and Y_Circle < -54) then
R_Rotation = -54.98 -- 处于槽口中间时
else if(R_Rotation < -110) then
R_Rotation = -110 -- 超出碰撞范围时得到 R_Rotation 传动轮旋转角度,范围 0 ~ 360 度。
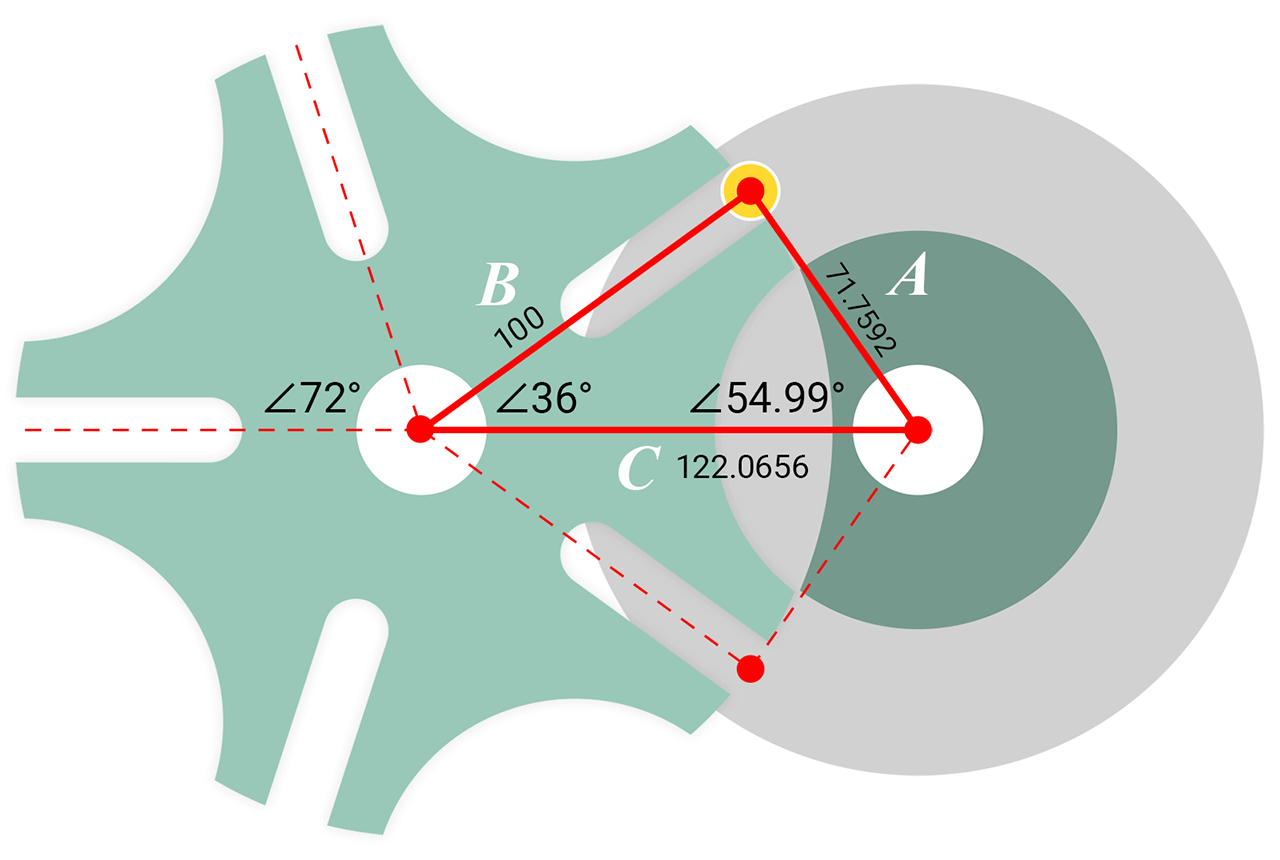
计算 B 边长
A_Side_Length = 71.7592 -- A 边长
C_Side_Length = 122.0656 -- C 边长
B_Side_Length = sqrt((pow A_Side_Length 2) + (pow C_Side_Length 2) - (2 * A_Side_Length * C_Side_Length * cos(radToDeg(R_Rotation + 54.9956) * (PI / 180))))计算日内瓦车轮角速度
D_Angle = gTrigonometric A_Side_Length B_Side_Length C_Side_Length "A"※ 使用 gTrigonometric 三角形计算函数 (MaxScript) 输出时则再依三角形来判断。
if(R_Rotation < -54.9) then
degToRad(D_Angle + 36 - (72 * (Loops as Integer))) -- 72 = 360/5 传动插槽数量
else if(R_Rotation > -55.1) then
-degToRad(D_Angle - 36 - (72 * (-Loops as Integer)))
else
54.98模拟日内瓦机构效果
使用 3D 软体来制作 Geneva Drive 日内瓦机构的动态影片,需要建立主动轮和从动轮的 3D 模型,并设定好它们的尺寸、位置和材质。然后使用 MaxScript 脚本语言来控制主动轮和从动轮旋转的程式码。使用 MaxScript 可以根据数学公式和逻辑规则来计算主动轮和从动轮的运动角度,并自动调整它们的旋转速度和方向,使得模拟更加真实和准确。