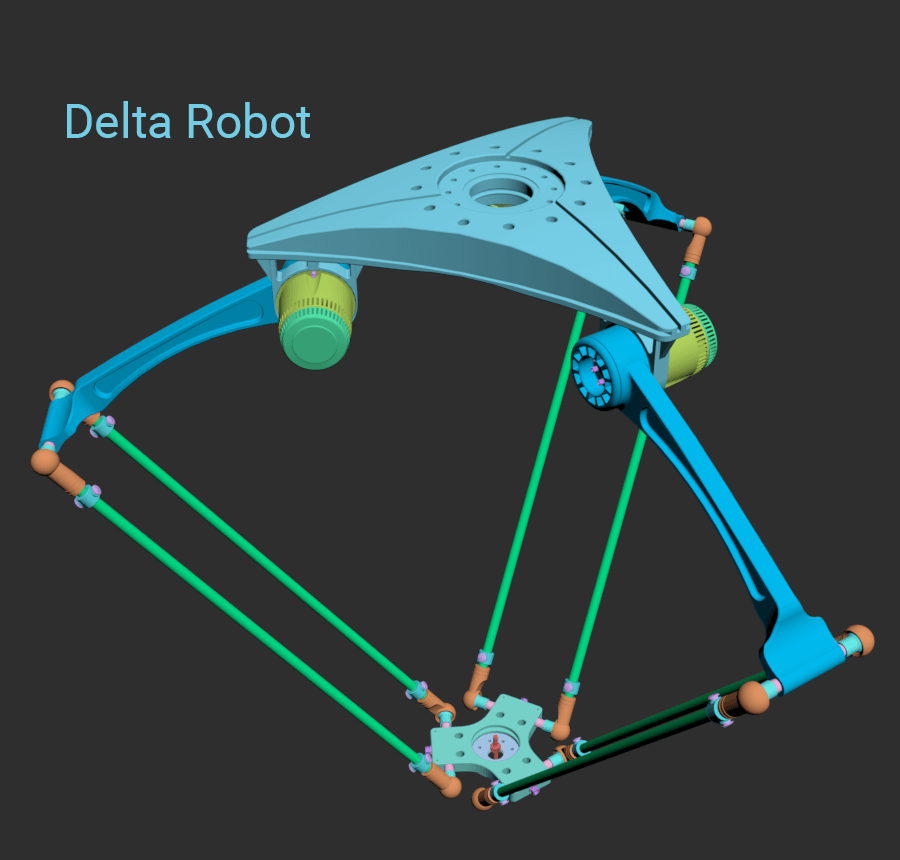
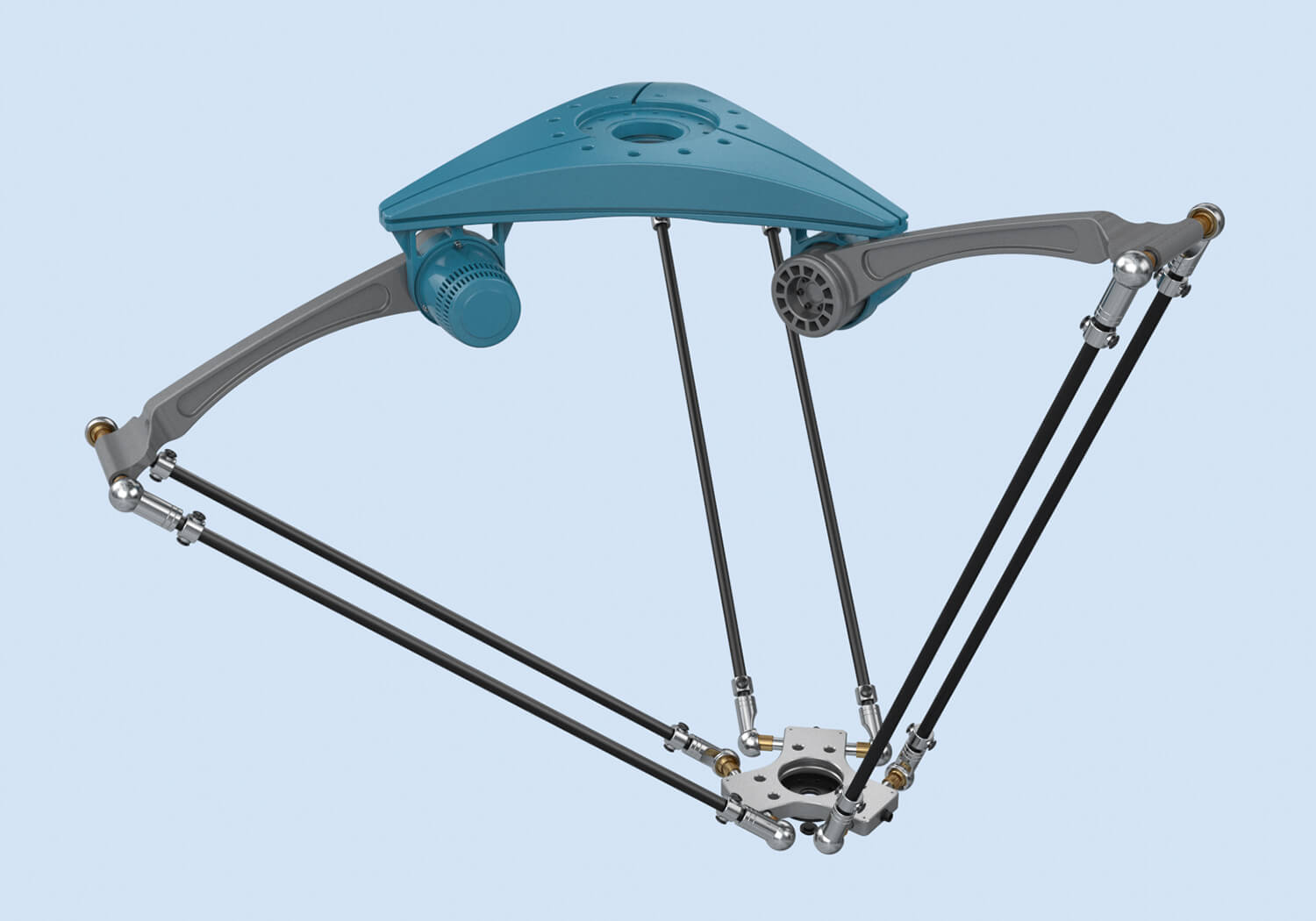
Delta Robot 并联式机器手臂
Delta Robot 并联式机器手臂、平行连桿,使用 3ds max Bones HI Solver 解算器 History-Independent 依赖 Bones 链的末端配合 IK Chain 位置的移动,解算出旋转的角度。但是当前型式 Actuating Arm 驱动臂只能处于 Y 轴的旋转,需要限制旋转方向。
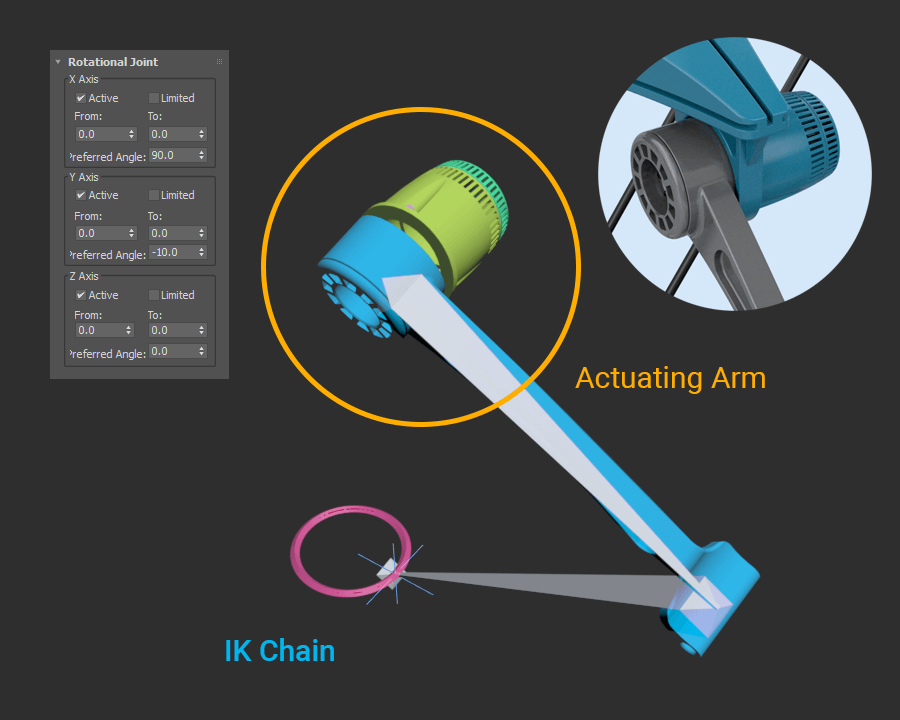
Actuating Arm Axis Limit 轴向限制
使用 3ds max Bone 骨骼 IK Chain 解算器
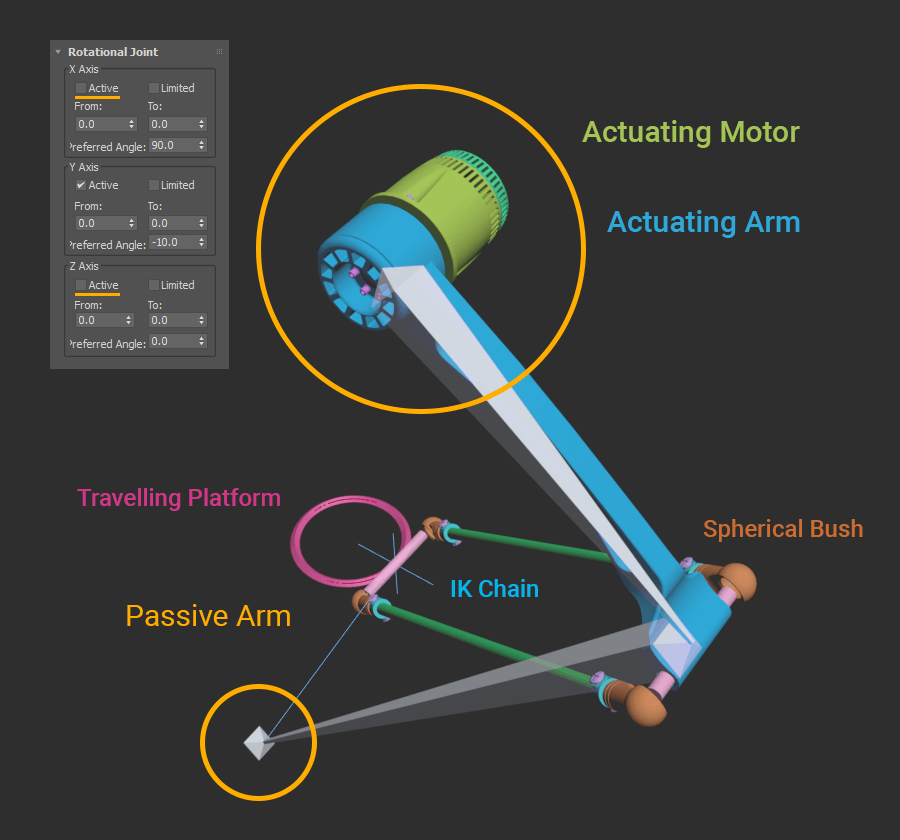
限制 X 及 Y 旋转方向,解算器 IK Chain 位置则不正确,并联式机器人 Passive Arm 被动臂则需要另外加一组 Bones 骨骼。
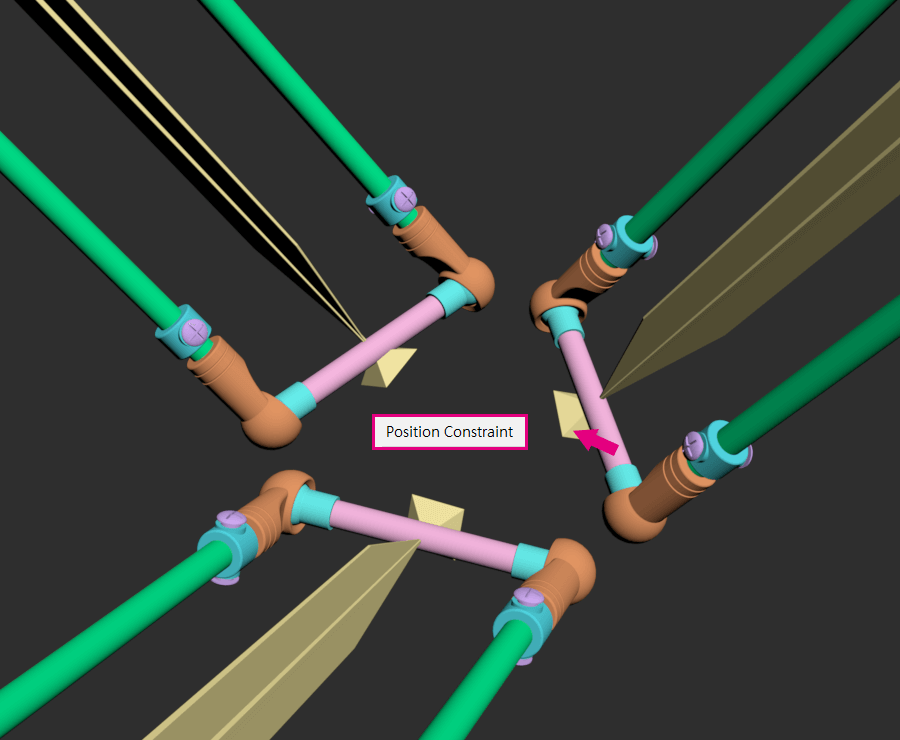
Position Constraint 位置约束
依据 Target 目标物件的 Position 位置的 Weight 加权平均位置进行定位。
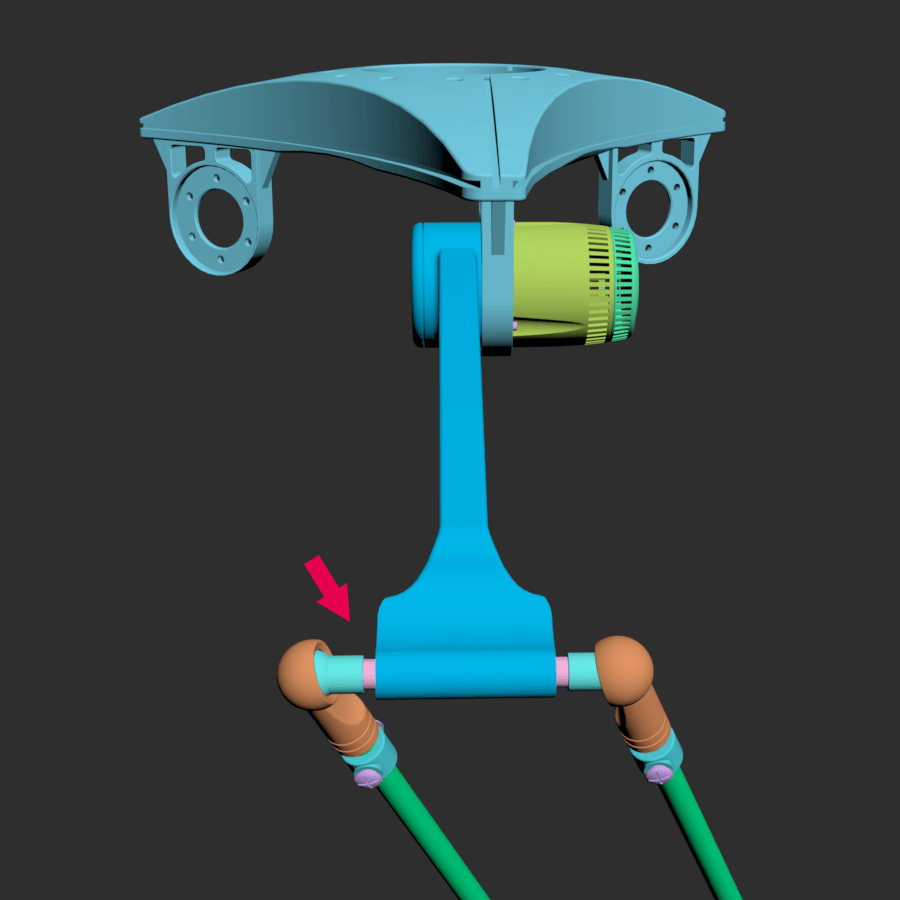
外加的一组 Bones 骨骼,需要限制 X 旋转方向,只有两节并且挷定于 Passive Arm 被动臂两端上方仍然只能处于 Y 轴的旋转,方向是以 Spherical Bush 球形衬套固定,是为了解决下方球形衬套 LookAt Constraint 的平行连桿机构方向跟踪。
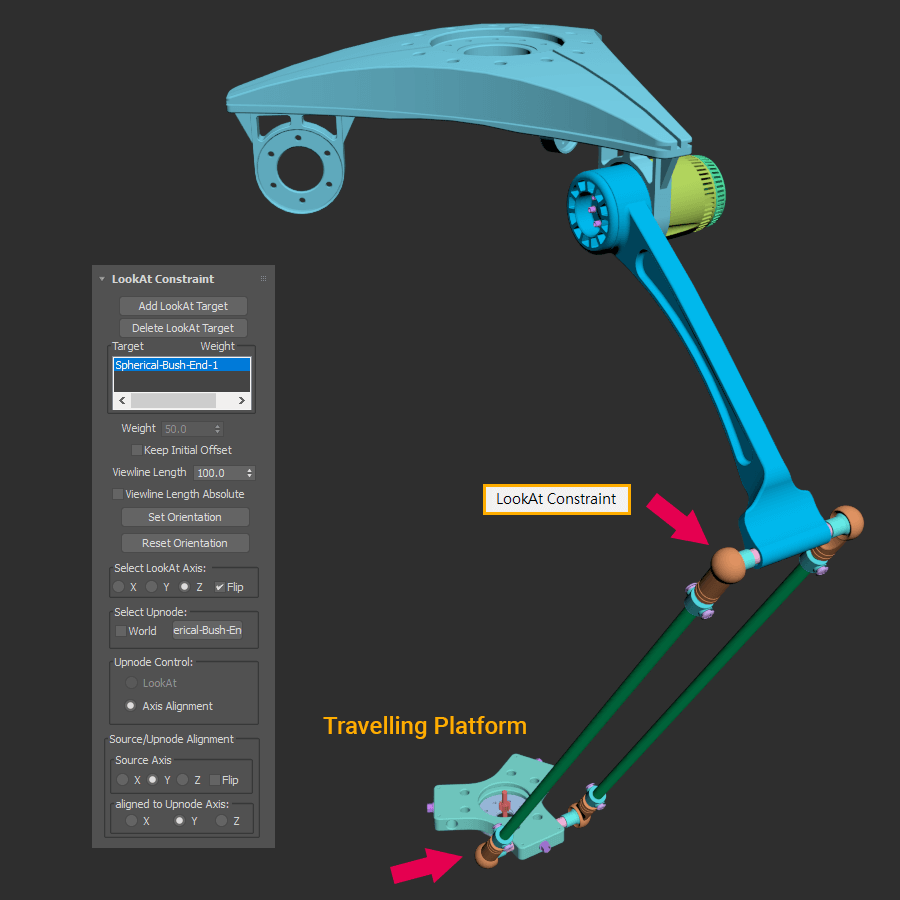
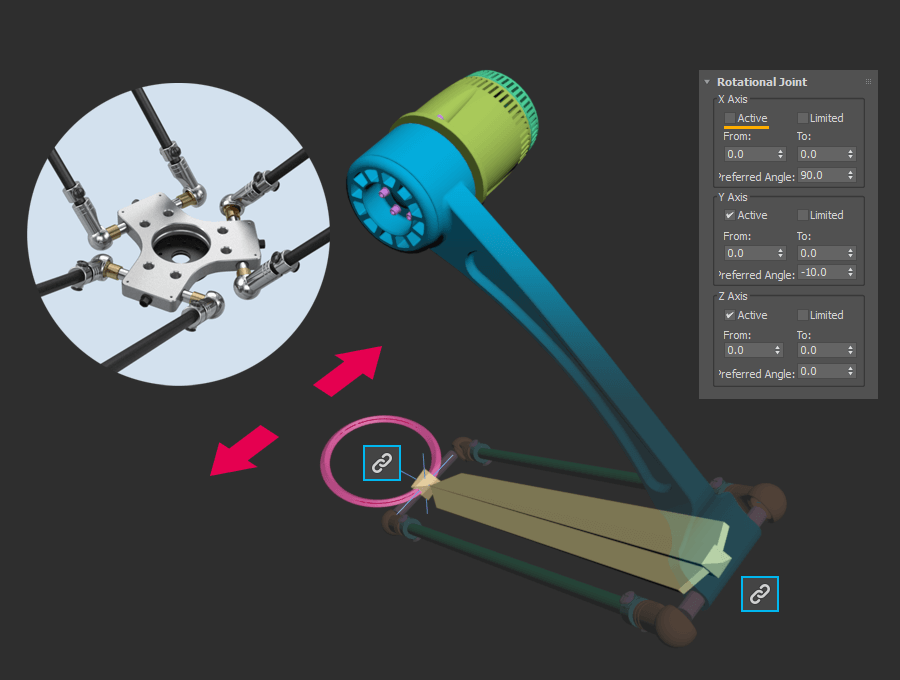
虽然 Position Constraint 球形衬套位置约束有跟上角度但是 Travelling Platform 会出现孔位拉扯问题。将其多关节机器人,驱动臂、被动臂再克隆且各别旋转 120 度组合成 Delta Robot 三轴机械手臂。
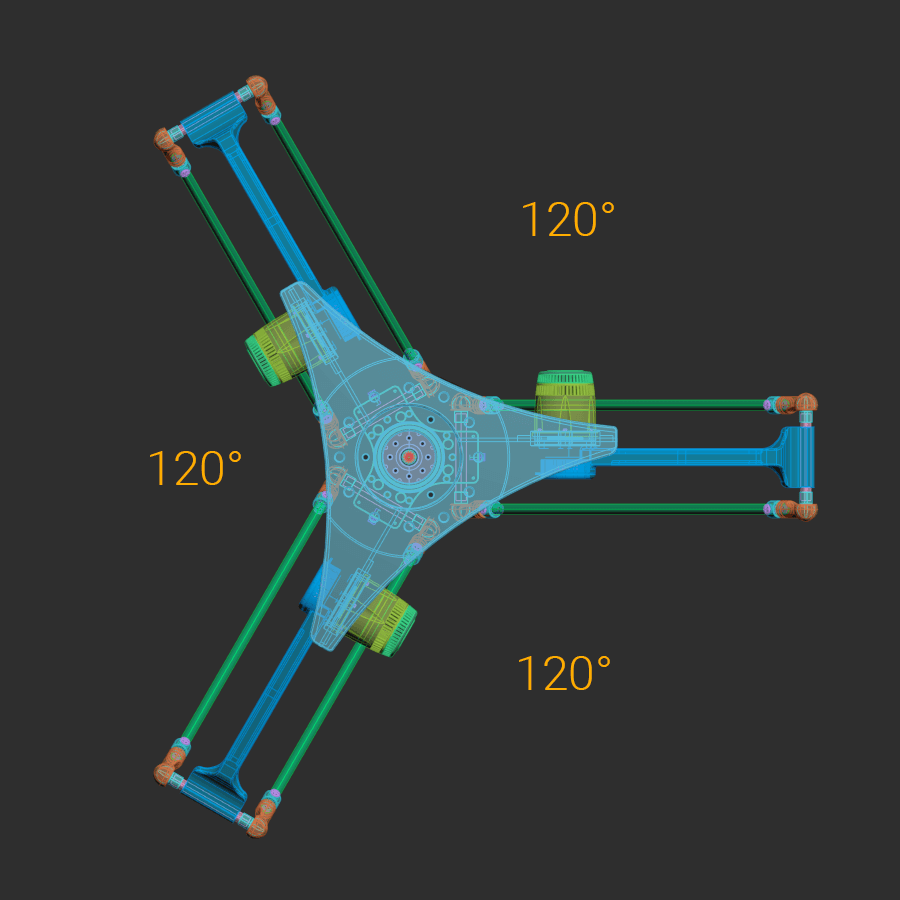
三轴机械手臂 3D 自动化的产业呈现
Delta Robot 三轴机械手臂、自动化的产业 Delta Robot 并联式机械手臂又称做 Parallel Robot 机械手臂(三角机器人)即时追踪,机械加工自动上下料解决方案、包装分类、电子组装、电子半导体、微型零件自动化等解决方案,採用工程塑胶和铝制部件,精确的动作、低惯性,为产线自动化与工厂智慧化发展之、高定位精度与高速性能。

自动化解决方案,通过使用 3D Render 着色应用
产品自动化的生产过程中,设备的应用表达方案是一个关键的环节,它可以帮助客户更好了解产品的功能和优势,可以执行各种复杂的操作,如搬运、装卸、组装和校正,提高生产精度、生产效率和灵活性。为了更好地展示机械手臂的性能和特点,使用 3D Render 着色应用来制作其动态影片。根据实际的机械手臂模型和材质效果,设计出各种不同的工作环境场景和动作,使其更加逼真和生动。可以通过动态影片展示机械手臂在不同的工业环境中的运作情况,以及其与其他设备的协同产品设备应用,更直观地感受到其优异的性能。提高自动化解决方案市场竞争力。